Key Use Cases
Tools in Detail

SCALEXIO
Next-generation modular HIL system with real-time multi-core processing. Supports massive I/O count, bus simulation, and ADAS sensor simulation. The industry's most widely deployed HIL platform.
MicroAutoBox
Compact real-time prototyping unit for deploying Simulink/TargetLink models directly onto vehicle-grade hardware. Used for prototype ECU function development and in-vehicle testing.

MicroLabBox
Desktop real-time system for lab-based prototyping and testing. Combines real-time processing with comprehensive I/O including CAN, analog, digital, and encoder interfaces.

ControlDesk
Experiment software for real-time testing and data acquisition. Provides virtual instrument panels, signal monitoring, calibration, and automated test sequencing.
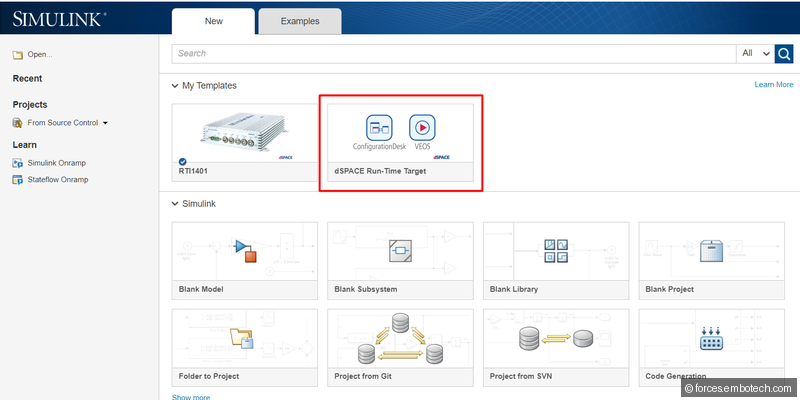
ConfigurationDesk
I/O configuration and real-time application building tool. Maps Simulink model signals to physical I/O channels and generates the real-time application code.
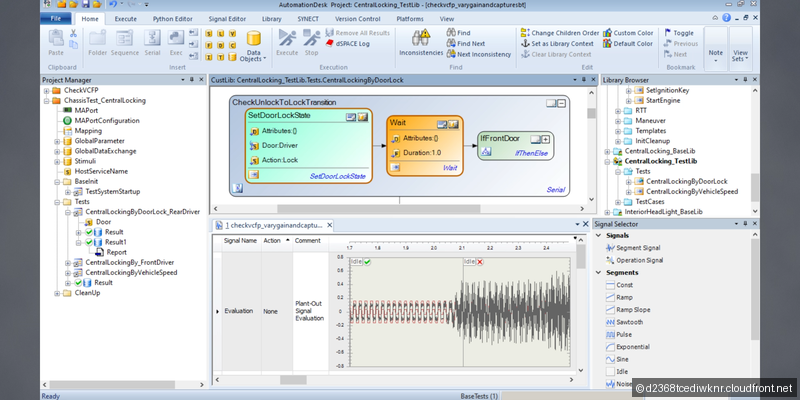
AutomationDesk
Test automation framework for HIL. Executes test scripts based on ASAM XIL API, supports Python scripting, and integrates with test management tools for CI/CD.

SystemDesk
AUTOSAR system architecture tool for designing ECU software architecture. Defines SWCs, compositions, system topology, and generates ARXML descriptions.
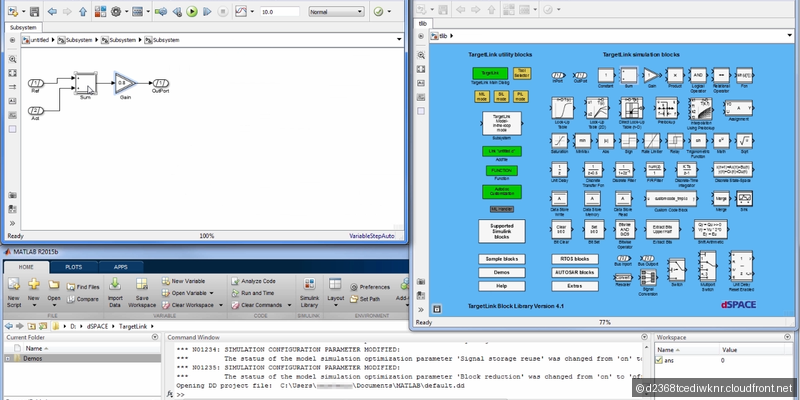
TargetLink
Production code generator for Simulink models. Generates MISRA-C compliant, ISO 26262 qualified code directly from model-based designs with full traceability.

SYNECT
Central data management platform for dSPACE projects. Manages HIL configurations, test data, model versions, and platform descriptions across distributed teams.
Industry Context
HIL simulation is the critical validation step between SIL testing and vehicle verification. It allows testing real ECU hardware against simulated plant models, catching integration bugs and timing issues that pure software simulation cannot find. dSPACE dominates with an estimated 70%+ market share in automotive HIL. A fully equipped SCALEXIO system can cost hundreds of thousands of euros, but is far cheaper than finding defects during vehicle testing or in production.
Typical Workflow
A model-based workflow follows the V-model. Algorithm engineers design control functions in Simulink and validate through MIL simulation. MicroAutoBox deploys prototypes into test vehicles. TargetLink generates production C code. The ECU is tested on SCALEXIO configured via ConfigurationDesk, with ControlDesk for interactive testing and AutomationDesk for automated campaigns. VEOS provides virtual HIL (SIL) for CI/CD integration. SYNECT manages all data artifacts.
Selection Guide
Pro Tips
Start HIL models simple and increase fidelity gradually - an overly complex model that can't run in real time is useless.
Verify ConfigurationDesk signal conditioning against ECU specs - wrong voltage ranges can damage hardware.
Use AutomationDesk fault injection blocks to test diagnostic responses - where most safety bugs are found.
dSPACE VEOS provides same simulation results as SCALEXIO but runs on standard PCs for CI/CD pipelines.
TargetLink back-to-back testing verifies generated C code matches Simulink model - run it every regeneration.